トップ
/ 研究事業


[2024] 人間機械共生工学
 |
|
健康共生プロジェクトSHELP / 健康寿命を延伸する共生型ロボットAIの研究開発

健康共生プロジェクトSHELP / 学生メンバ専用 (認証保護) : HSユニット・卒業研究
健康共生プロジェクトSHELP / 管理メンバ専用 (認証保護) : 研究分担者・事務局
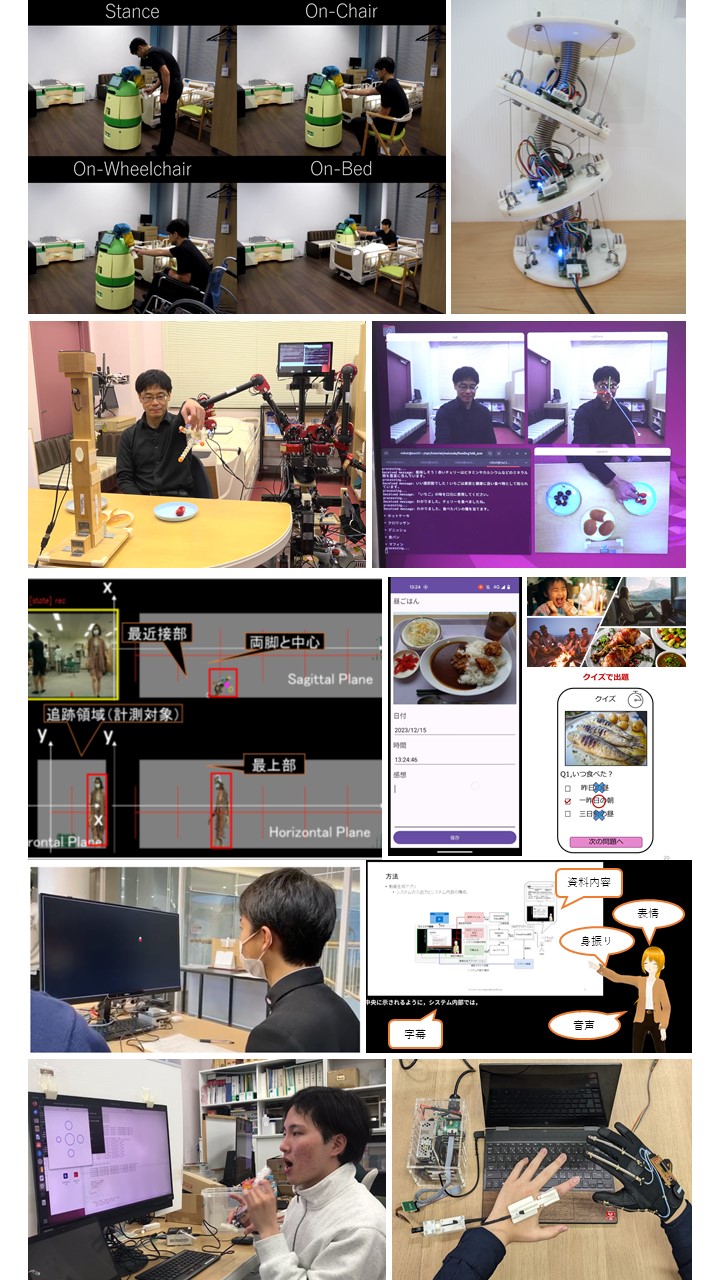
研究概要:少子高齢化が進む日本では、「国民の健康寿命を延ばす社会」の構築を目指して、介護予防や健康管理の施策を推進しています。一方、日常のなかで人々から健康への意識や行動を引き出すための方法や環境のあり方は、未だ良く分かっていません。本研究では居住空間に機械学習するロボットAIを導入し、歩行、会話、食事などの場面に介入して自立的な行動や認知を促すことで、私たちの健康寿命を延ばすきっかけを生み出します。(大学総合案内2021より)
人間機械共生研究 〜人間と機械の共生と進化を探る〜
専門分野:人間機械共生工学、認知発達システム、介護医療福祉支援
機械・システム・ロボットなどの人工物が人や環境に働きかけながら発達し、応対する人の心や力も育まれるような、人と機械の共生的な行動・発達の方法論を探ります。人が言語の原理を知らずとも話し、歩行の原理を知らずとも歩けるのはなぜか、機械が体を持つことでどのような知能や心が創られるか、人工物の介入によって人の心や体はどのように発達、進化するか?医療、介護、教育、製造、サービス分野の現場で検証していきます。
介護医療支援ロボティクス
| キーワード:ロボット、福祉機器、プロダクトデザイン 高齢者や障害者の生活支援ニーズに基づいたロボットの研究開発を行います。介護施設や病院でのヒアリング調査に基づいてロボットを開発し、現場で試験評価します。これまでに介護施設、製造企業、地域行政と連携して、職員の業務負担を軽減する見守りロボットを製品化しました。福祉ロボットの普及や導入も推進しています。 |
 |
身体拡張インタフェース
| キーワード:ヒューマンインターフェース、ユニバーサルデザイン、人間工学 身体に装着して運動機能の維持回復を助けるインターフェースの研究開発を行います。手指や口腔などの特定部位の運動を計測して身体外の機器を動作させ、機器の計測情報をもとに利用者の感覚を刺激することで身体機能を拡張します。口腔の感覚運動とロボットアームを連動させたり、手指の動作を転写して運動訓練を行います。 |  |
機械学習・認知発達システム
| キーワード:人工知能、データベース、画像処理 動作を介して身体や物体を認識する学習アルゴリズムの研究開発を行います。ロボットが自律的に運動を生成して感覚との相関や因果を学習して、ロボットに身体や環境を認識させます。探索的に物体を操作して物体の形状・重さ・摩擦を把握したり、ロボットに物体操作の効果を学習させて物体の道具としての機能を発見させます。 |
 |
感覚運動統合・感性情報処理
| キーワード:マルチメディア、バーチャルリアリティ、コンピュータグラフィックス 複合的な感覚刺激を与えて人間の知覚や認識を強化するシステムの研究開発を行います。全身動作を計測しながら視覚、聴覚、触覚などを複合した刺激を与えることで姿勢や運動の知覚を助けたり、目標の認識を高めて運動を誘導します。人間の感覚運動のループに介入することで、感覚情報の統合や運動制御の精度を向上させます。 |
 |
以下、英文の紹介です。(和訳する予定です)
Nursing Robots and Environmental Sensor Networks
We are developing a mobile robot Terapio that supports medical doctors while doing the rounds in hospitals. Terapio has a function to deliver medical tools and information by autonomous tracking and power assisted locomotion. The robot is able to provide access to clinical information and audio-video data stored in previous treatments and recode new information on-line while giving medical cares. We are developing environmental sensor networks that accommodates total nursing with Terapio. The network system connects mobile nursing robots and sensors embedded in the environment. The system then recognizes activities of patients and caregivers to support them with nursing robots. A data server manages sensor information of the position, motion, and identity of people and materials as well as sensory-motor information of nursing robots in order to coordinate between people, robot and environment.
(Contributers: Terashima, K., Tasaki, R., Miura, J., Kitazaki, M.)

Terapio, a round support robot
Developmental action perception and sensory-motor integration
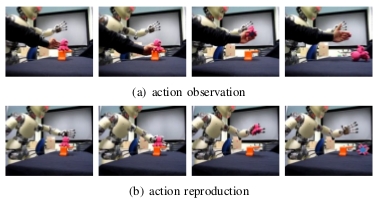
We propose a cognitive system that allows an anthropomorphic robot to observe object operation performed by humans and reproduce the similar operation. The robot characterizes a self-generated action based on the action effect for objects. This action coding enables the robot to identify actions that share the common goal but performed by different agents (e.g. the self and other). Moreover, the system allows cross-sensory association that can reconstruct sense of touch from visual observation. The system does not require either body kinematics nor sensory-motor configuration for this learning, since the robot autonomously differentiates the own body from the environment and then learns primitive actions of object operation through stochastic motor exploration.
(Contributers: Saegusa, R., Natale, L., Metta, G., Sandini, G.)
Action mirroring (top: observation,bottom: reproduction)
Body schema development based on visuo-motor correlation
This work proposes a plausible approach for a humanoid robot to define its own body based on visuomotor correlation. The high correlation of motion between vision and proprioception informs the robot that a visually moving object is related to the motor function of its own body. When the robot finds a motor-correlated object during motor exploration, visuomotor cues such as body posture and the visual features of the object are stored in visuomotor memory. Then, the robot developmentally defines its own body without prior knowledge on body appearances and kinematics. Body definition is also adaptable for an extended body such as a tool that the robot is grasping. The body movements are generated in the manner of stochastic motor babbling, whereas visuomotor memory biases the babbling to keep the body parts in sight. This ego-attracted bias helps the robot explore the joint space more efficiently. After motor exploration, visuomotor memory allows the robot to anticipate a visual image of its own body from a motor command. The proposed approach was experimentally evaluated with humanoid robot iCub.(Contributers: Saegusa, R., Metta, G., Sandini, G.)

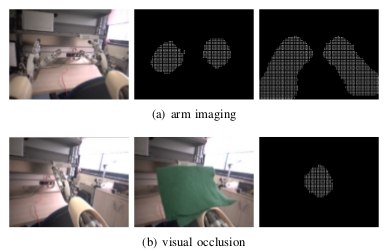
Body definition (left top: original, left bottom: extended)
Proprioceptive body imaging (right top: body segments, right bottom: occlusion)
Proprioceptive body imaging (right top: body segments, right bottom: occlusion)
Self-protective whole body movements and motor instruction
We developed an intelligence model that allows a humanoid robot to protect the self by whole body movements that the robot learned. The model consolidates local motor reflexes driven by force sensing with global adaptive reactions based on visual and vestibular stimuli. The robot therefore reduces physical load from the environment. We think that these self-protective behaviors are an important factor to realize robot's long-term motor learning. We are extending the model to allow an humanoid robot to learn whole body movements by humans' kinesthetic teaching and its reconstruction. We first teach the robot movements (e.g. walking and sitting-up) with supporting the robot. The robot extracts motor features, and use them in reinforcement learning of the movements without the support. The recycle of encoded motor knowledge enhances the learning speed in the different condition.
(Contributers: Shimizu, T., Saegusa, R., Ikemoto, S., Ishiguro, H., Metta, G.)
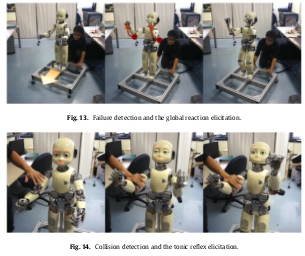
Body protection (top: grobal reaction based on vestibular sensing,
bottom: local reflex based on force sensing)
bottom: local reflex based on force sensing)
Rhythm associator to create music with humans and drawing effect
We developed a rhythm associating system. We first demonstrate an ensemble of rhythm performances for the system. The system then extracts couples of rhythm sequences and trains the rhythm associator. The similarity of rhythms is computed based on the hierarchical analysis, that provides the natural association in termes of human sense. After the leaning, the system plays rhythm sequences by listening the human rhythm performance. The behavior of the system is original in accepting the human player's suggestion to change the rhythm, and proposing a more suitable rhythm to the human player. This coordination create an music ensemble in which both the man and system can take leadership.
(Contributers: Kasahara, S., Saegusa, R., Hashimoto, S.)
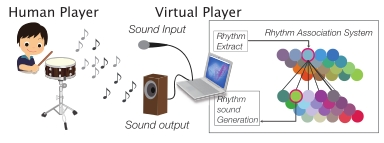
Rhythm association in man-machine rhythm ensemble
Nonlinear data compression and pattern recognition
We developed a neuromorphic model of nonlinear principal component analysis that compresses high-dimensional data. Principal component analysis (PCA) is a standard linear method in data analysis. We proposed nonlinearization of the PCA. Non-parametric nonliear functions that play the role of data encoding or decoding are constructed with a hierarchical constrain. The hierarchically structured functions represent the data efficiently with less principal components than the linear PCA. We evaluated efficiency of data compression and decompression with large sets of image data. This approach is applicable for subspace-based pattern recognition. The set of functions forms manifolds (nonlinear principal axes) in the data space, and the manifolds totally represent subspace of a categorical data.
(Contributers: Saegusa, R., Sakano, H., Hashimoto, S.)
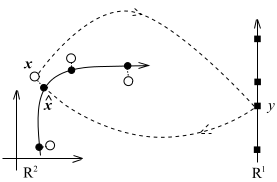
Paradigm of Nonlinear compression
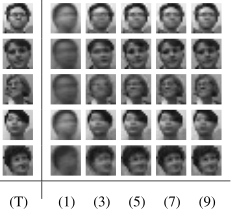
Nonlinear image compression